欢迎您来到半岛在线登录官网



来源:半岛在线登录官网 发布时间:2024-02-23 17:42:31
步进电机是无刷直流电机,可以小角度旋转,这些角度称为步进。一般步进电机使用200步完成360度旋转,意味着其每步旋转1.8度。步进电机用于许多需要精确旋转运动的设备,如机器人、天线、硬盘驱动器等。我们大家可以通过给出适当的说明将步进电机旋转到任何特定角度。主要有两种类型的步进电机可供选择,单极和双极。单极更容易操作、控制,也更容易获得。在本教程中,我们将步进电机与STM32F103C8(蓝色药丸)板连接。
跳线 是一款单极步进电机,需要 5V电源。电机具有4线圈单极性布置,每个线V,因此使用Arduino,RaspberryPi和STM32等任何微控制器都相对容易控制。但是我们需要像ULN2003这样的电机驱动IC来驱动它,因为步进电机消耗大电流,可能会损坏微控制器。
另一个需要注意的重要数据是步幅角度:5.625°/64。这意味着电机按 8 步顺序运行时每一步移动 5.625 度,完成一整圈需要 64 步(5.625*64=360)。以下数据表中提供了其他规格:


它用于根据从微控制器接收到的脉冲驱动电机。以下是ULN2003的图片图:
引脚(IN1 到 IN7)是输入引脚,(OUT 1 到 OUT 7)是相应的输出引脚。COM 被赋予输出设备所需的正源电压。步进电机的进一步连接在下面的电路图部分给出。


如下图所示,PWM引脚以波形(~)表示,有15个这样的引脚可用于步进电机的脉冲输出。我们只需要四个引脚,我们使用(PA0到PA3)。
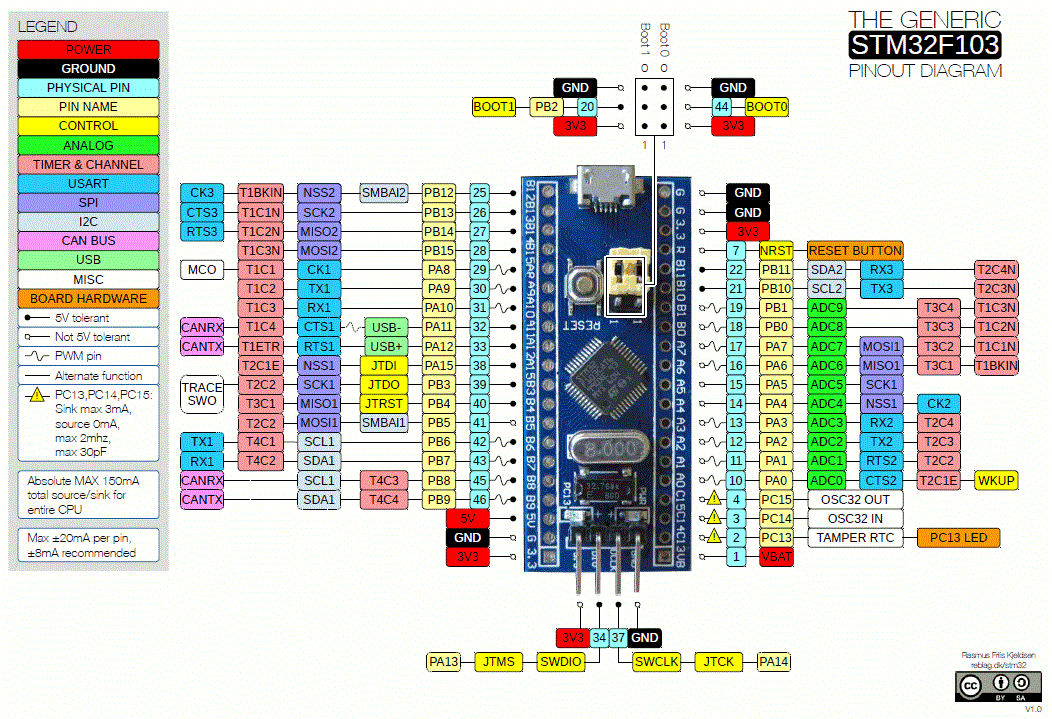
引脚(PA0 至 PA3)被视为与 ULN2003 IC 的输入引脚 (IN1-IN4) 连接的输出引脚。
然后通过ARDUINO IDE(工具>
串行监视器)或CTRL + SHIFT + M中的串行MONITER以顺时针(+值)或逆时针方向(-值)手动输入旋转步骤。

与前面的教程一样,我们通过USB端口使用Arduino IDE对STM32F103C8进行了编程,而无需使用FTDI编程器。
然后我们定义 no。旋转时要完成的步骤,这里我们使用 32,因为我们使用的是全步(4 步序列)所以 (360/32 = 11.25 度)。因此,对于一步,轴移动 11.25 度,即步幅角。在 4 步序列中,一个完整的旋转需要 4 个步骤。
我们还可以使用半步模式,其中有 8 步序列 (360/64=5.625) 步幅。
当我们设置速度时,我们必须从连接到电位计的PA4中获取模拟值。所以我们必须为此声明 pin
然后,我们将模拟值转换为数字值,将这些值存储在整数类型的变量中,之后我们必须映射ADC值以设置速度,因此我们使用以下语句。在此处了解有关将ADC与STM32配合使用的更多信息。
我们必须创建如下所示的实例来设置连接到电机的引脚。在这些步骤中要小心,因为大多数步骤在此模式中都会出错。它们给出了错误的模式,因此线圈无法通电。
以下语句用于从串行监视器获取步骤的值。例如,我们需要 2048 个值进行一次完整旋转 (32*64 = 2048),即 64 将是齿轮比,32 将是一次旋转的半步序列。
下面的代码用于调用实例并运行电机。如果旋转值为 1,则调用函数步进器一次,完成一次移动。
关键字:引用地址:将步进电机与STM32F103C8板连接的教程上一篇:
1引言 对于需要自助式护理的病人来说,尤其是由于手术后、晚期癌症、分娩等原因所导致的慢性疼痛的病人,往往需要一种可以由病人自己操作、自动定时、定量向病人进行输液的智能型自动输液器,以达到治疗和镇痛的目的。为此,笔者设计了一种便携式医用自动输液器,该仪器采用电池作为供电电源,并具有功耗小、体积小、重量轻等特点,可满足便携式需要。此外,该仪器使用安全可靠、计量准确、自动化程度高,可适应现代医学发展的要求。该自动输液器的主要功能如下: (1)可根据要求设定滴数、输液总量及药液总量等参数。 (2)随时可改变原设定参数,并可以在运行时随时暂停输液。 (3)不同的使用者可以有自己的一套运行参数,并可通过密码进入自己的设定环境。 (
Molex宣布推出 Micro-Latch 2.00 毫米线对板连接器系统,该系统适合工业自动化、消费品及汽车市场上的客户使用。连接器系统可理想用于需要耐高温设计的紧凑型应用,在满足各种标准要求的同时,仍然具有出色的可靠性。独一无二的功能特点使该连接器系统具备更好的端子保持效果、增强了牢固性,同时具有绝佳的配对能力。 Micro-Latch 2.00 毫米线 个单排插入式电路,同时具备垂直和水平配置,配备了通孔端子、2.00 毫米螺距的低外形连接器,符合 RoHS 的规定要求并具有耐高温能力,并且用于市场上广泛销售的压线端子和电缆。其紧固件设有端子插杆。该系统还配备了摩擦锁以及防误插功能 – 类
器系统 /
摘要:介绍由美国TI公司的数字信号处理器TMS320LF2407A和SGS公司的步进电机驱动芯片PBL3717A构成的两相混合式步进电机的控制系统。 关键词:PBL3717A DSP 步进电机 控制系统 引言 步进电机是数字控制系统中的一种重要执行元件,广泛应用于各种控制系统中。它是一种将电脉冲信号转换为位移或转速的控制电机,输入一个脉冲信号,电机就转动一个角度或前进一步。其机械角位移和转速分别与输入电机绕组的脉冲个数和脉冲频率成比例,能够最终靠改变脉冲频率在大范围内调速,易于与计算机或其它数字元件接口,适用于数字控制系统。随着超大规模集成电路技术的迅速发展,DSP(Digital Signal Processor数字信号处理
步进电机开环控制的原理 当步进电机的定子一相绕组流过直流电流时,最接近该相的转子齿被定子相吸引,因产生的电磁转矩大于负载转矩,从而使转子运动。当转子转动到电磁转矩与负载转矩平衡位置时,转子就静止不动了,此电磁转矩也就把负载转至需要定位的位置。然后再对下一相施加激磁电流,另外一个最接近该相的转子齿被吸引,负载被该相电磁转矩驱动,移动1个步距角,到达下一个静止位置。激磁相切换的次数与频率决定了转子旋转的最终角度与速度。切换相的次数与步距角的乘积为步进(专有名词为步动作增加的角度)角度,此值决定最终静止位置。相对负载转矩来说,如步进电机产生的转矩足够大,则切换指令就能驱动负载,作位置控制。此时的位置平衡力是由步进电机静态转矩产生
开环控制的原理 /
随着智能手机,平板电脑, 数码相机(DSC),数字音频播放器等产品的多功能化,需要安装的部件数量越来越多,为了使有限的基板空间得到更有效的利用,实现产品的小型化和薄型化,需要将所搭载部件进行高密度安装。 京瓷连接器制品株式会社(以下简称“KCP”)日前开发出的智能手机用电路板对电路板连接器“5849系列”,就满足了电子设备的高密度安装需求。其开发的5849系列产品是0.35mm间距、嵌合高度0.5mm的省面积,少极数的电路板对电路板连接器,而且,连机器嵌合时的锁扣结构是KCP所独有的,低背且具有良好的手感,强化了拔去时的保持力。 此外,该产品接点部分采用“夹持接点形状”(2点接触),是一种抗振动、抗冲击能力强的构造。插头部分的
器“5849系列” /
单片机控制28BYJ-48步进电机驱动 单片机源程序如下: #include reg52.h #include intrins.h unsigned char CCW ={0x80,0xC0,0x40,0x60,0x20,0x30,0x10,0x90}; //逆时钟旋转相序表 unsigned char CW ={0x90,0x10,0x30,0x20,0x60,0x40,0xC0,0x80}; //正时钟旋转相序表 //unsigned char tab = {0x0f}; sbit K1 = P3^0; //反转按键 sbit K2 = P3^1; //正转按键 sbit K3 = P3^2; //停止按键
步进电机是一种完全数字化的电动执行机构,从原理上说,其角位移与驱动脉冲的个数成正比,在正常情况下,步进电机具有使用简单、运动精确、连续运行无累积误差等特点,因而被广泛应用于各种位置控制管理系统中。当前由于仪器内部的机械系统日益复杂,其运动往往是多自由度的,因而通常需要利用多个步进电机的运动合成来实现系统的各种动作。例如,对图1所示的半自动生化分析仪的取样针移位系统,该系统的动作执行就是由两部分组成的:一是固定基座上的步进电机控制取样横臂进行垂直方向上的升降运动;二是滑块上的步进电机控制取样横臂进行水平方向上的旋转运动。这两个运动的合成实现了取样横臂的位置变换。 传统的步进电机多轴控制器是以微控制器(MCU)/微处理器(MPU)/专
步进电机是一种电动机,它通过逐步改变电磁场的方向来驱动转子,从而实现转动。步进电机的特点是可以精确定位,因为它们可以在每一个步骤中停下来,不需要反馈系统。另外,步进电机的转速和扭矩与电流的大小成正比,因此它们非常适合需要精确控制和定位的应用,例如打印机、数控机床、3D打印机和机器人等。 在使用步进电机时,一定要按照规定的电流和脉冲数控制电机,避免电机超载或者失步现象。另外,步进电机使用过程中也要注意保持清洁、避免油污、灰尘等物质进入电机内部,影响电机运转。 步进电机的使用方法一般包括以下几个方面: 1、接线:根据步进电机的型号和使用要求,正确接线。一般步进电机需要接控制信号线、电源线、使能信号线、方向信号线
【得捷Follow me第4期】+小白手把手带你学习rp2040+w5500(所有任务)
驱动控制技术及其应用设计研究
驱动技术发展及现状
驱动的研制
MPS电机研究院 让电机更听话的秘密! 第一站:电机应用知识大考!跟帖赢好礼~
电源小课堂 从12V电池及供电网络优化的角度分析电动汽车E/E架构的趋势
解锁【W5500-EVB-Pico】,探秘以太网底层,得捷电子Follow me第4期来袭!
【下载】LAT1362 利用STM32 TIMER触发ADC实现分组转换
【下载】LAT1334 基于MCSDK5.4.8电机库修改两电阻采样方法
【下载】LAT1347 基于STM32CubeIDE移植ClassB 4.0
【下载】LAT1340 STM32H5读取温度传感器校准值时进HardFault的原因分析
【生态】使用STM32CubeMX在STM32U5上配置LPBAM应用程序
【MPU】轻松使用STM32MP13x如MCU般在Cortex A 核上裸跑应用程序
【新品】STM32H5-Arm® Cortex®-M33 内核,主频高达250MHz,提升性能与信息安全性
【新品】STM32MP13X-支持Linux、RTOS和Bare Metal应用,新一代通用工业级MPU
【新品】Arm® Cortex®-M33处理器内核,运行频率160 MHz,基于Armv8-M架构并带有TrustZone®
【新品】降本增效这事儿,就看STM32C0,低至0.24美元” ,开机即可物联世界
【GUI开发】TouchGFX 4.23:支持矢量字体,节省Flash,更丰富的UI!
【边缘AI】突破边缘AI应用的次元壁:首届意法半导体边缘人工智能峰会举行
【生态系统】STM32CubeProgrammer和STM32CubeIDE协同调试的方法
【无线携手创新微MinewSemi共创低功耗模块,引领中国智能连接未来

中断系统1 数据传输方式无条件传输:处理器不必了解外部设备状态,直接进行数据传输,用于指示灯和按键等简单设备 。查询方式:传输前,一 ...
如果在STM32微控制器的串口通信中,接收中断无法触发,可能有以下几个可能的原因:1 串口接收中断未使能:在初始化串口时,可能未正确使 ...
ADC:1 STM32内部的ADC模块有三个ADC1,ADC2,ADC3,他们彼此独立,所以可以进行同步采样。2ADC的输入时钟不得超过14MHz,它是由PCLK2经分 ...
STM32是大范围的应用的MCU,涵盖Cortex-M0、M3、M4和M7内核,共有1236多个系列,包含STM32主流MCU、STM32高性能MCU、STM32超低功耗MCU、STM32无 ...
1简介SPI:Serial Peripheral Interface,是串行外设接口。SPI是由摩托罗拉于 1985 年前后开发,是一种适用于短距离、设备到设备通信的 ...

51单片机PIC单片机AVR单片机ARM单片机嵌入式系统汽车电子消费电子数据处理视频教程电子百科其他技术STM32MSP430单片机资源下载单片机习题与教程词云:
友情链接: